シミュレーションでPhysical AIをスケールさせる ――約1,400億円で買収されたMentee Roboticsに見る「AIファースト」アプローチ
2026年1月、自動運転とADASシステム及びチップを手掛けるMobileyeが、フィジカルAIへ参入、Mentee Roboticsを900m$(約1,400億円)で買収することを発表した。このMentee Roboticsが2025年にイスラエルで開催されたTech・AI Robotics Conferenceで講演を行っている。
講演者は、MobileyeのCTO兼Mentee Roboticsの共同創業者の一人であるShai Shalev-Shwartz氏である。同社をAmnon Shashua氏、Leo Wolf氏とともに設立した人物だ。
本記事では、これら講演で語られたことを中心にして、 同社のヒューマノイドロボットへのアプローチがどのように行われているかを整理している。
Mentee Roboticsとは
Mentee Roboticsとは、2022年にMobileye CEOのAmnon Shashua氏やCTOのShai氏、そしてテルアビブ大学コンピュータサイエンス学部の非常勤教授も務めており、コンピュータービジョンとディープラーニングを専門とするLeo氏によって設立された。
講演では、過去25年間のAIの進化は、以下の6つの革命として語られている。
機械学習
深層学習
GPT
統合(Consolidation)
推論(Reasoning)
Sim-to-Real
特に重要なのは、統合・推論・Sim-to-Realを含む複数の革命が、近年に集中して起きているという点である。この条件が揃ったことで、ヒューマノイドはもはや機械設計や制御理論の延長ではなく、AIの問題として正面から扱える段階に入った、というのがMentee Roboticsの出発点であるとShai氏は語る。
経験学習をシミュレーションで実現するアプローチ
データ学習と経験学習
Mentee Roboticsの技術思想の中核にあるのが、学習を二つに明確に分けて考えるという前提である。
一つは「Learning from Data」であり、観測データから規則性を抽出する学習である。言語理解、画像理解、音声理解といった領域では、自己教師あり学習による大規模モデルが極めて高い性能を示してきた。GPTに代表されるモデルは、この学習形態の有効性を象徴している。
もう一つが「Learning from Experience」である。ロボットが物理世界で行動するためには、試行錯誤を通じて成功と失敗を経験する学習が不可欠である。講演では、髭剃りの例えを用い、「動画を見ただけでは身につかず、実際にやってみる必要がある」ことが説明されている。
問題は、この経験学習を実世界で行うことが非現実的である点にある。現実世界は物理時間に縛られ学習が遅く、かつ失敗が危険を伴う。自律走行やヒューマノイドの操作において、無制限な試行錯誤は許されない。
経験学習をシミュレーションで実現する
この制約を回避するために、Mentee Roboticsは経験学習の主戦場をシミュレーションに置くという選択をしている。ただし、シミュレーションと実世界の間には必ずズレが生じる。これがSim-to-Realギャップである。このSim-to-Realギャップは、現在多くのフィジカルAI企業が直面する課題でもあり、フィジカルAIのスケーラビリティを妨げる壁となっている。
そして、シミュレーターの次のステップと現実の次のステップの間のギャップが、シムと現実のギャップです。
このギャップは、摩擦やその他の小さな要素など、シミュレーターで十分にモデル化されていない要素のすべてが原因です。
とShai氏は語る。
多くのロボティクス企業が、このSim-to-Realギャップの課題があるために、大量のロボットを現実環境で動作させてタスク動作を学習させるというリアルアプローチを取っている。
しかし、Mentee Roboticsはあくまでシミュレーションで対応していくという戦略を取る。重要なのは、このギャップを「例外的な誤差」として扱うのではなく、最初から前提条件として学習構造と設計に組み込むことだ。
Sim-to-Realギャップへの対処として、以下の三つの方針が同時に取られていることが説明されている。
学習を用いたシミュレータの高度化
シミュレーションのパラメータ自体も学習で最適化する。シミュレーションを完成したものとして捉えるのではなく、シミュレーション自体も進化させていくという考え方。ランダマイゼーションによるロバスト性獲得
シミュレーション中にランダム性を加え、ばらつきに対して頑健な方策を学習する。アクチュエータから計算基盤まで含めたハード・ソフト一体設計
アクチュエータや制御系を自社で設計し、それらをシミュレーションに反映できるようにすること。
垂直統合HWのロボットV2/V3
講演ではMentee Roboticsのヒューマノイドについても説明される。下記の画像にあるように、AIファーストなアプローチであることが強調されている。
Mentee Roboticsのヒューマノイドロボットへのアプローチ
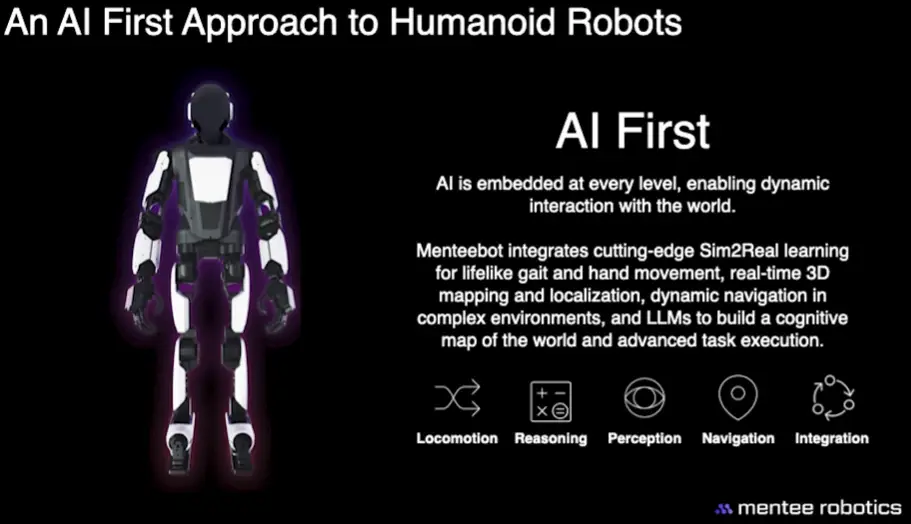 画像は講演動画より
画像は講演動画より
Robot V2では、以下の機能が単一のAIシステムとして統合されている。
音声理解(音声→テキスト)
言語理解(指示の解釈・分解)
視覚理解(環境・物体認識)
認知地図の構築とナビゲーション
歩行・姿勢制御
V2では、歩行に関わる高レベルの制御方策が、強化学習によってシミュレーション上で学習され、それが実機に適用されている。
最新のRobot V3では、この思想を維持したまま、設計が「実運用」を意識したものへと進化する。外観の洗練に加え、バッテリー交換を前提とした連続稼働設計が導入され、補助バッテリーによって24時間稼働が可能になる。
実はこのバッテリーの問題というのは実際にヒューマノイドロボットを運用しようとすると、避けては通れない問題となっている。現状のバッテリーでは数時間しか駆動できず、どのように充電するのか、または交換するのか、という運用上の問題はまだ未確定な部分が多い。Menteeはバッテリー交換による24時間稼働という方策を取ったようだ。
講演で語られたWorld Foundation Modelの考え方
講演の後半では、ロボット分野におけるFoundation Modelについての考え方が説明されている。ここで用いられているFoundation Modelという言葉は、言語モデル分野で使われている用語との類比として導入されている。
テキスト分野においては、大規模な事前学習モデルがさまざまなタスクに適応可能な基盤として機能していることを踏まえ、ロボット分野においても同様の基盤モデルが必要になると述べている。この文脈で、World Foundation Modelという表現が用いられている。
講演で説明されているロボット向けFoundation Modelの構成要素は以下の通りである。
Foundation Modelのアーキテクチャ
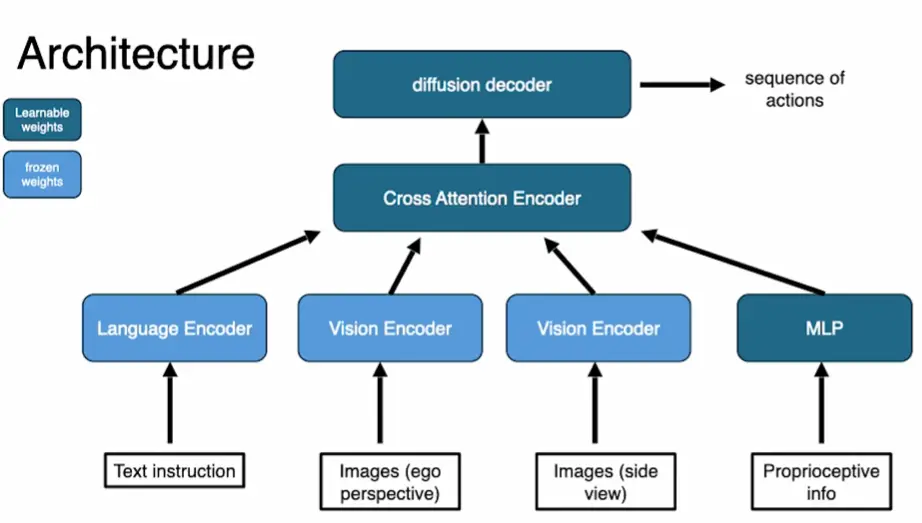 画像は講演動画より
画像は講演動画より
言語および視覚のエンコーダについては、インターネット規模のデータで事前学習されたモデルを用い、重みを固定したまま利用すると説明されている。その理由として、シミュレーションと実世界の差異を小さくすることが挙げられている。
そして下層のレイヤーで処理されたデータがクロスアテンションエンコーダーで処理されていく。なお、講演ではこのモデルの詳細についてはそこまで説明がされていない。
私たちのアプローチ、つまりヒューマノイドロボットに対する AI ファーストのアプローチは、データからの学習を活用して言語、視覚、音声の理解を行うことです。したがって、これらすべてがデータからの学習に非常に適しています。
データ効率のためにシミュレーションの経験から学んだことを活用し、独自のハードウェアの設計とソフトウェアとハードウェアの緊密な統合によってシミュレーションと実際のギャップを埋め、ギャップを学習して、ギャップに対して堅牢になることでギャップを埋めます。
一見、シミュレーション側からのアプローチであるためハードウェアにはあまり縛られない印象であったのだが、講演の中では、ソフトウェアとハードウェアの緊密な統合が重要である点に触れている。
アクチュエータの挙動
モータの特性
制御信号と実際の運動の関係
これらのハードウェアの特性をシミュレーションで表現し、Sim-to-Realギャップを解決するには、統合的アプローチが必要になるということのようだ。
今後はMobileyeの中で開発が加速
本講演はあくまで技術的内容にフォーカスしたものであり、社会実装や市場性、事業展開といったトピックには特に触れられていない。
しかし、MobileyeによるMentee Roboticsの買収を背景に、今後はヒューマノイドロボットの研究開発が、より大きな組織的・技術的基盤の中で進められていくことが想定される。
Mobileyeはこれまで、自動運転分野においてシミュレーションを活用した大規模学習や、実世界との乖離を前提とした技術開発を積み重ねてきた企業であり、そうした知見や計算資源、開発体制は、今後Mentee Roboticsの技術検証や事業化のスピードに大いに影響を与えるだろう。
もっとも、Mobileye自身は本業において、中国勢の台頭や自動車市場の先行き不透明感、自動運転・ロボタクシー領域における長期的な実証・開発コストといった課題も抱えており、これらの外部環境がヒューマノイド領域への投資や位置づけにどのように影響するのかは、今後を見極める必要がある。
参考文献:
※1:同社HP( リンク)
※2:Mentee’s Foundation Model -- Learning from Data and Learning from Experience(リンク)
【世界のフィジカルAIの動向調査やコンサルティングに興味がある方】
世界のフィジカルAIの業界動向調査、技術調査、新規事業機会の探索、参入戦略立案、パートナー探索などに興味がある方はこちら。
先端技術調査・コンサルティングサービスの詳細はこちら

関連記事




CONTACT
お問い合わせ・ご相談はこちら

